
DURAARK contribution accepted at GRAPP 2014
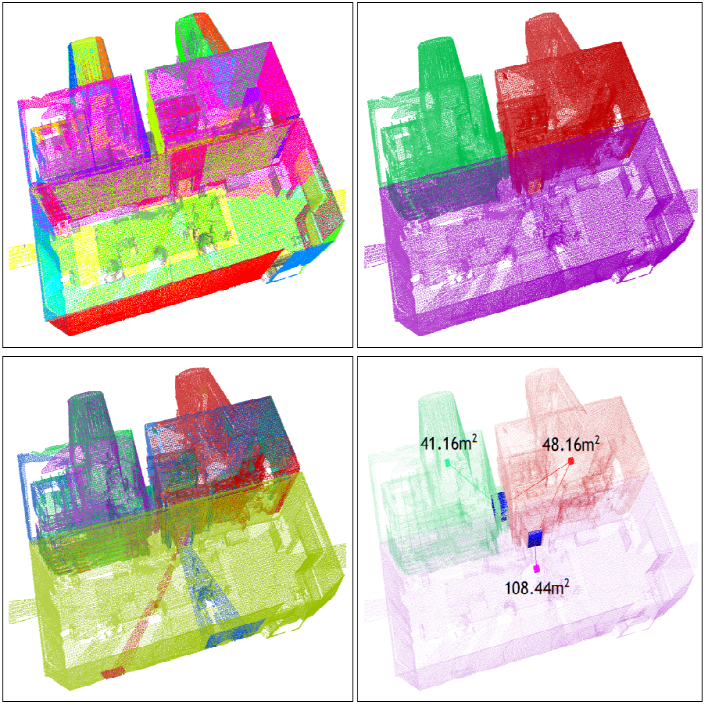 Our recent submission Automatic Generation of Structural Building Descriptions from 3D Point Cloud Scans has been accepted for presentation at the upcoming 9th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (GRAPP 2014). The paper introduces a new and exciting method for segmentation of unstructured 3D point cloud scans into higher-level semantic entities including rooms and stories. By that, room areas as well as the topology of a building can be efficiently approximated. Our approach represents another step towards a system that will enable efficient curation of 3D point cloud and BIM data in a long-term digital archive.
Our recent submission Automatic Generation of Structural Building Descriptions from 3D Point Cloud Scans has been accepted for presentation at the upcoming 9th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (GRAPP 2014). The paper introduces a new and exciting method for segmentation of unstructured 3D point cloud scans into higher-level semantic entities including rooms and stories. By that, room areas as well as the topology of a building can be efficiently approximated. Our approach represents another step towards a system that will enable efficient curation of 3D point cloud and BIM data in a long-term digital archive.

Leave a Reply